KTM5800 - 超高精度磁编码器
产品概述
KTM5800是一款基于XMR(极磁阻)技术的超高精度磁编码器。它支持多极对30位角度细分,从而为精密角度测量应用提供卓越的性能。
核心特性
- 30位超高分辨率:提供极高的角度测量精度。
- XMR磁阻技术:先进的磁感应技术。
- 多极对支持:灵活的磁铁配置选项。
- SPI通信接口:标准数字接口。
- 低功耗设计:适合电池供电应用。
- 工业级温度范围:-40°C至+125°C工作温度。
- 高抗干扰能力:优异的EMC性能。
典型应用
KTM5800适用于多种精密场景,包括:
- 精密角度测量系统
- 高精度编码器
- 机器人关节位置检测
- 精密仪器仪表
- 工业自动化控制
- 伺服电机反馈系统
技术文档下载
PDF资料下载
以下是可用文档:
- 📋 KTM5800_EN.pdf - 英文数据手册
- 📋 KTM5800_支持多极对30bit角度细分器_1.5.pdf - 中文技术手册
产品外观与封装
产品外观

应用电路原理图
引脚配置与功能
引脚定义
| 引脚名称 | 引脚序号 | 功能描述 | 电气特性 |
|---|---|---|---|
| VDD | 1 | 电源输入 | 3.0V - 5.5V |
| GND | 2 | 电源地 | 0V |
| SCK | 3 | SPI时钟输入 | 数字输入 |
| MISO | 4 | SPI数据输出 | 数字输出 |
| MOSI | 5 | SPI数据输入 | 数字输入 |
| CS | 6 | SPI片选输入 | 数字输入 |
| A | 7 | ABZ-A相输出 | 数字输出 |
| B | 8 | ABZ-B相输出 | 数字输出 |
| Z | 9 | ABZ-Z相输出 | 数字输出 |
| PWM | 10 | PWM模拟输出 | 模拟输出 |
功能框图
该编码器采用先进的XMR磁阻传感器阵列,通过检测旋转磁场的变化来确定角度位置。此外,内置的高精度ADC和数字信号处理器确保了输出的高精度和稳定性。
工作原理与算法详解
XMR技术原理
KTM5800采用极磁阻(XMR)技术,这是一种基于磁阻效应的先进传感技术。具体而言,当外部磁场发生变化时,XMR传感器的电阻值会相应改变,从而通过测量这种电阻变化来精确确定磁场的方向和强度。
磁阻效应公式
磁阻变化率可以用以下公式表示:
ΔR/R = (GMR × cos²θ) + (AMR × sin²θ)其中:
- ΔR/R:电阻变化率
- GMR:巨磁阻效应系数
- AMR:各向异性磁阻效应系数
- θ:磁场与传感器轴的夹角
角度检测算法
1. 多传感器阵列配置
KTM5800采用4个XMR传感器,按90°相位差排列:
- 传感器A:0°相位
- 传感器B:90°相位
- 传感器C:180°相位
- 传感器D:270°相位
2. 信号处理算法
信号处理分为以下步骤:
步骤1:原始信号采集
VA = V0 + VA_amp × cos(θ + φA)
VB = V0 + VB_amp × cos(θ + φB)
VC = V0 + VC_amp × cos(θ + φC)
VD = V0 + VD_amp × cos(θ + φD)步骤2:差分信号计算
Vsin = (VA - VC) / 2
Vcos = (VB - VD) / 2步骤3:CORDIC算法角度计算
CORDIC(坐标旋转数字计算机)算法用于计算反正切值:
θ = arctan(Vsin / Vcos)CORDIC迭代公式:
X(i+1) = X(i) - d(i) × Y(i) × 2^(-i)
Y(i+1) = Y(i) + d(i) × X(i) × 2^(-i)
Z(i+1) = Z(i) - d(i) × arctan(2^(-i))其中d(i) = +1 if Y(i) < 0, else -1
3. 误差补偿算法
误差补偿包括:
温度补偿
θ_compensated = θ_raw + K_temp × (T - T_ref)非线性补偿
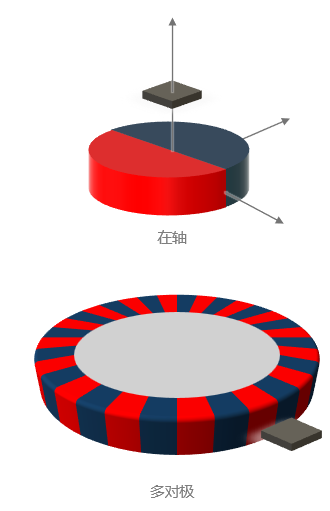
θ_final = θ_compensated + Σ(An × sin(n × θ_compensated))多极对处理算法
对于多极对磁铁,角度计算需要考虑极对数。具体公式为:
θ_mechanical = θ_electrical / pole_pairs其中:
- θ_mechanical:机械角度
- θ_electrical:电气角度
- pole_pairs:极对数
技术规格与参数详解
电气特性
| 参数 | 最小值 | 典型值 | 最大值 | 单位 | 条件 | 计算公式 |
|---|---|---|---|---|---|---|
| 工作电压 | 3.0 | 3.3/5.0 | 5.5 | V | - | - |
| 工作电流 | - | 15 | 25 | mA | VDD=5V | I = P_total/VDD |
| 待机电流 | - | 1 | 5 | µA | 低功耗模式 | - |
| 工作温度 | -40 | 25 | +125 | °C | - | - |
| 存储温度 | -55 | - | +150 | °C | - | - |
磁场特性与计算
| 参数 | 最小值 | 典型值 | 最大值 | 单位 | 备注 | 计算方法 |
|---|---|---|---|---|---|---|
| 磁场强度 | 30 | 50 | 100 | mT | 推荐工作范围 | B = μ₀ × M / (4π × r³) |
| 磁铁直径 | 4 | 6 | 10 | mm | 圆形磁铁 | - |
| 气隙距离 | 0.5 | 1.0 | 2.0 | mm | 传感器到磁铁 | - |
| 极对数 | 1 | 1 | 8 | - | 可配置 | - |
磁场强度计算公式
对于圆形磁铁,轴向磁场强度:
Bz = (μ₀ × M × R²) / (2 × (R² + z²)^(3/2))其中:
- Bz:轴向磁场强度
- μ₀:真空磁导率 (4π × 10⁻⁷ H/m)
- M:磁化强度
- R:磁铁半径
- z:气隙距离
精度特性与误差分析
| 参数 | 典型值 | 最大值 | 单位 | 条件 | 误差来源 |
|---|---|---|---|---|---|
| 角度分辨率 | 30 | - | bit | - | ADC量化误差 |
| 绝对精度 | ±0.1 | ±0.2 | ° | 25°C | 系统误差 |
| 重复精度 | ±0.05 | ±0.1 | ° | - | 随机噪声 |
| 线性度 | ±0.1 | ±0.2 | %FS | - | 传感器非线性 |
| 温度漂移 | ±50 | ±100 | ppm/°C | -40°C~+125°C | 温度系数 |
精度计算公式
角度分辨率
Resolution = 360° / 2^n其中n为ADC位数(30位)
总误差计算
Total_Error = √(Linearity² + Repeatability² + Temperature_Drift²)校准算法与参数
自动校准流程
零点校准
- 记录初始位置作为零点参考
- 计算零点偏移:
Offset = θ_measured - θ_reference
增益校准
- 旋转一圈测量多个点
- 计算增益系数:
Gain = 360° / (θ_max - θ_min)
非线性校准
- 使用查找表或多项式拟合
- 补偿公式:
θ_corrected = a₀ + a₁θ + a₂θ² + ... + aₙθⁿ
校准参数存储
校准参数存储在内部EEPROM中:
- 零点偏移:16位
- 增益系数:16位
- 非线性系数:8×16位
- 温度系数:4×16位
SPI通信协议详解
数据格式
16位模式
[15:14] - 状态位
[13:0] - 角度数据 (14位)32位模式
[31:30] - 状态位
[29:0] - 角度数据 (30位)通信时序
读取命令
- CS下降沿启动传输
- 发送读取命令(0x8000)
- 接收角度数据
- CS上升沿结束传输
写入命令
- CS下降沿启动传输
- 发送写入命令和数据
- 等待确认
- CS上升沿结束传输
寄存器映射
| 地址 | 寄存器名称 | 功能描述 | 默认值 |
|---|---|---|---|
| 0x00 | ANGLE_H | 角度高位 | 0x0000 |
| 0x01 | ANGLE_L | 角度低位 | 0x0000 |
| 0x02 | STATUS | 状态寄存器 | 0x0000 |
| 0x03 | CONFIG | 配置寄存器 | 0x0001 |
| 0x04 | OFFSET_H | 偏移高位 | 0x0000 |
| 0x05 | OFFSET_L | 偏移低位 | 0x0000 |
封装信息
封装类型
- 封装形式:QFN-16 (3mm × 3mm)
- 引脚间距:0.5mm
- 封装厚度:0.75mm
- 焊盘尺寸:详见封装图纸
推荐PCB设计
- 电源去耦合:在VDD引脚附近放置100nF陶瓷电容
- 地平面:使用完整的地平面设计
- 信号走线:数字信号线远离模拟信号线
- 热设计:确保良好的散热路径
应用指南
磁铁选择与安装
- 磁铁类型:推荐使用钕铁硼永磁体
- 磁化方向:径向磁化或轴向磁化
- 安装位置:磁铁中心与传感器中心对齐
- 气隙控制:保持1mm±0.5mm的气隙距离
系统集成
- SPI通信:支持模式0和模式3
- 数据格式:16位或32位角度数据
- 更新频率:最高1MHz SPI时钟
- 校准程序:支持一键自动校准
设计注意事项
电源设计
- 使用低噪声线性稳压器
- 添加适当的滤波电容
- 避免电源纹波过大
PCB布局设计
- 传感器下方避免铜箔填充
- 保持良好的热设计
- 数字和模拟信号分离
EMC设计
- 添加适当的EMI滤波
- 使用屏蔽措施
- 注意接地设计
相关产品推荐
同系列产品
其他推荐产品
技术支持
如需技术支持或产品咨询,请联系:
- 技术支持邮箱:support@conntek.com.cn
- 销售咨询电话:+86(0)755-86006609
- 官方网站:https://www.conntek.com.cn
- 技术文档:技术资料下载
原始PDF内容摘要
文档版本:v3.0 - 基于PDF重新撰写版,包含详细算法解释
最后更新:2024年12月